

Research in Computer Science
Exploration and Analysis of Ceramic Fabrication and Computation Using Material Extrusion and Robotic Additive Manufacturing
By Jasmin Singh
Introduction

[Fig. 1] New Bedford Research and Robotics’ additive manufacturing robot.
Ceramic is a material that is gaining traction in various industries, including electronics, energy, machinery, and biotechnology. Its strength and resistance to high temperatures make it an ideal material for creating functional parts with intricate structures that are difficult to manufacture using conventional techniques. This opens up a vast range of potential use-cases for ceramic additive manufacturing technology. In the biomedical field, clay materials are already widely used for applications such as artificial bones, joints, and teeth.
The purpose of this research is to learn how we might support human contribution and artistic creation, not to undermine either. With material extrusion and robotic additive manufacturing, it is possible to explore the possibilities of creating more complex structures based on a variety of materials and with more precision and accuracy than human-made structures. There are active attempts to produce structures that go beyond simple shape production, pushing the boundaries of what is possible with 3D printing technology.
The range of media that can be used for additive manufacturing is expanding rapidly, driven by the increasing range of applications and the need for more sustainable and efficient manufacturing methods. As a result, there is immense potential for innovation and progress in the field of ceramic additive manufacturing.
Methods
As an undergraduate researcher, I collaborated with a team of researchers to determine key parameters for 3D printing with clay, collecting valuable data to gain insight into its operation and allowing for a comprehensive analysis of its respective properties and applications. The following variables were the subject of our study: frequency or flow rate (measured in hertz), the speed at which clay is extruded; nozzle size (measured in millimeters), the diameter of the nozzle used to extrude the material; and layer height (measured in millimeters), the fixed height for each extruded layer. During our investigation, our research team was unable to establish certain critical variables, such as the moisture level of the clay.
Early research into clay additive manufacturing involved developing experimental designs to evaluate bridging and overhang to see how designs printed with clay are executed and how they support their weight.
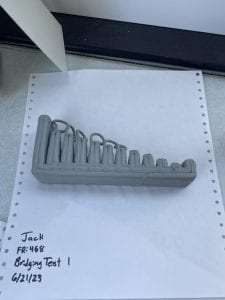

[Fig. 2a, 2b] Design created by Jack Kertscher entitled Overhang Test I, one of many
designs to test overhang in ceramic additive manufacturing. Printed with a frequency of 468Hz, layer height of 1mm, nozzle size of 3mm, machine speed at 40%. Overhang failed at approximately 15mm.
Bridging refers to segments in additive manufacturing where the extruder distributes material over the air between two supported points in the same layer as the bridge. This eliminates the need for support beneath the bridge.
Overhangs are unbalanced slopes caused by 3D printing’s usual layer-by-layer method–when a layer reaches the bottom of a slope, each succeeding layer must extend slightly beyond the layer before it, sometimes causing a disproportionate distribution of weight that causes the slope to hang.
Variables such as frequency, nozzle size, layer height, and machine speed can affect these parameters.
Contributions
Ensuring the printed clay structure could support its own weight came up frequently during our research. I focused on designing structures that could maintain their own weight without the use of external or supplementary supports. To examine weight distribution, I created experimental designs dependent on twisted constructions. These prints supported their weight without trouble both during and after printing.


[Fig. 3a, 3b] Design created by Jasmin Singh entitled TwistExpUpd, a twisted structure printed with a frequency of 308Hz, layer height of 1mm, nozzle size of 3mm, machine speed at 40%.
Proceeding with this design, I created a closed, twisted dome structure that can support its weight. At the time that this summary is written, there is no record of a closed dome shape printed with ceramic. I will continue studying with this particular design as a result. A larger print of this design, roughly 1 foot by 1 foot in size, will be made in order to assess the weight distribution and capped structures on a larger scale.


[Fig. 4a, 4b] Multiple prints of design created by Jasmin Singh entitled TallTwistDome, a twisted and closed dome structure. TallTwistDome (rightmost) printed with a frequency of 298Hz, layer height of 1mm, nozzle size of 3mm, machine speed at 40%. TallTwistDome2 (second from left) printed with a frequency of 198Hz, layer height of 0.5mm, nozzle size of 3mm, machine speed at 40%. TallTwistDome4 (leftmost) printed with a frequency of 248, layer height of 0.7mm, nozzle size of 3mm, machine speed at 40%. Observe the gaps within each layer within the print caused by a relation between layer height and frequency.
Conclusion
Ceramic additive manufacturing focuses on the use of advanced technology to create structures with precision and intricacy that standard manufacturing processes may struggle to achieve. As the field continues to evolve, we can anticipate breakthroughs and solutions that will reshape industries and contribute to a more sustainable and adaptable manufacturing landscape. Furthermore, we can expect an increased integration of ceramic additive manufacturing into mainstream production methods.
Our primary objective revolves around identifying variable correlations in order to establish a comprehensive standard operating procedure (SOP) tailored for ceramic additive manufacturing. Concurrently, our research efforts persist as we work towards preparing a comprehensive research paper that will thoroughly document our discoveries.
As we learn more about the principles of clay additive manufacturing, we will be able to effectively apply this knowledge to various use cases, allowing for the optimal design execution.